MEMS Inclinometer

SSM25385-05 Servo Accelerometer
- INQUIRY
. Axis:1,2,3
. Range: ±2g
. frequency: DC~200Hz
. Resolution:2micro-g
Features
l Directly output the acceleration voltage signal of the corresponding axis
l Differential dynamic force balance servo principle
l Frequency range DC~200Hz
l Lateral sensitivity ≤1%FS
l Non-liner error ≤1%FS
l Sensitivity 2.5V/g
l Dynamic range ≥120dB
l Protection class IP68(long-term work under 50m)
l Anti-corrosion class C5-M
Description
SSM25385-05 servo accelerometer is a three-component output force balance servo accelerometer, mainly used for wind turbine structure and earthquake monitoring or testing.
The sensor sensitive circuit components of the SSM25385-05 servo accelerometer use high-performance magnetic cylinders, and the processing circuit uses high voltage regulator chips and filter chips. The sensitive element is a variable capacitor attached to the movable mass. The movable mass module is connected to the instrument support through two symmetrical reeds. The movable mass and the reeds form a typical spring-vibrator system. There is a double-sided opening ring electrode (moving plate) on the movable mass, and a fixed plate (fixed plate) of the same shape parallel to the upper and lower sides of the moving plate. These three plates constitute the sensitive element of the sensor -Variable capacitance. Below the movable mass is connected a coil that exerts a balancing force, and the coil just falls in an annular magnetic gap. The magnetic field of the magnetic gap is provided by a new type of strong magnetic material neodymium iron boron permanent magnet.
When the measured object moves, a relative displacement occurs between the moving piece and the fixed piece of the capacitor. The relative displacement is converted into a voltage signal by the circuit, which is amplified and sent to the coil on the movable mass in the form of a current through the feedback circuit, and the energized coil. The interaction with the permanent magnetic field produces an ampere force equal in magnitude and opposite to the measured acceleration applied to the movable mass. This is the origin of the "force balance". The output voltage of the accelerometer is proportional to the feedback current, and naturally proportional to the measured acceleration.
Applications
Structural health and vibration monitoring of Boost station or tower
Datasheet
Measurement Fundamental | Differential dynamic-coil transducer type force balance accelerometer |
Measurement Range | ±2.0g |
Resolution | 2μg |
Accuracy | 2.5V/g |
Frequency Range | DC~200Hz@-3dB |
Parasitic Resonance Frequency | >500Hz |
Measurement Axes | Signal-axis, Two-axis, Three-axis |
Linearity | Better than 1.0% |
Dynamic Range | ≥120dB |
Output Noise | <10μV |
Damping Constant | 0.7 |
Cross Sensitivity Ratio | <1%(include angular deviation) |
Zero Drift | 200μg/℃(typical value) |
Power Supply | 5~18V DC,40mA |
Protection | IP68(long-term work under 50m) |
Shell Material | Aluminum Alloy (hard anodized) |
Cable | Waterproof PG plug and shielded cable, standard 2m(extendable) |
Pin Definition | See the label on the cable, the acceleration voltage signal for each axis is independently drawn and wired |
Anti-corrosion class | C5-M |
Weight | 1.0Kg |
Operating Temperature | -30℃ ~+75℃ |
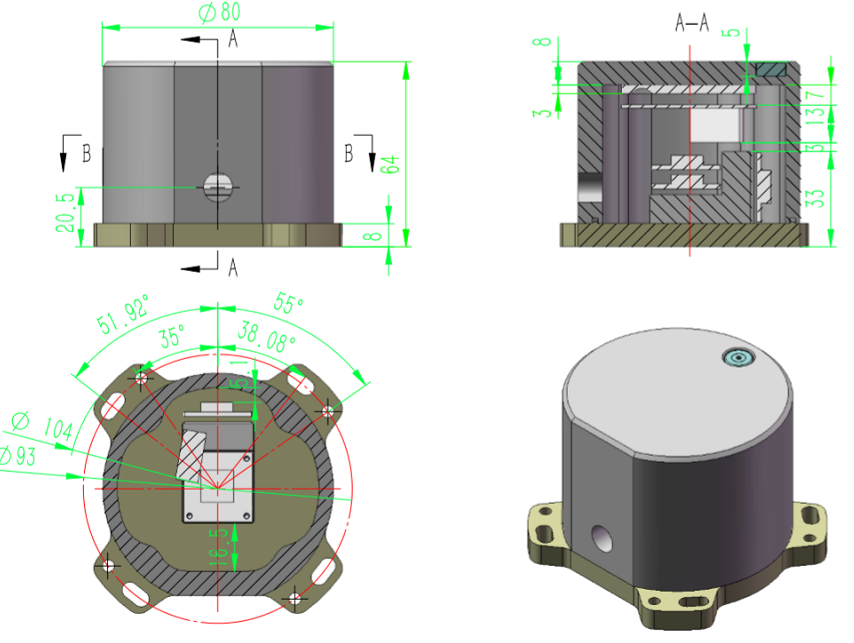
Volume | Φ104×64mm |
Mounting Base Dimensions | Φ104×8mm |
Installation Hole | M4 screw hole |
Boundary Dimension(mm)
Installation Steps
In order to ensure the reliability of micro-vibration signal and strong-vibration signal recording, when installing the accelerometer, it is necessary to ensure a firm connection between the accelerometer and the surface of the foundation pier. If the accelerometer slides in the horizontal direction or loses contact in the vertical direction during an earthquake, the recording will be distorted, and the recorded data will be distorted and unusable. For this reason, when setting up the accelerometer, measures must be taken to ensure a good connection between the accelerometer and the surface of the foundation pier during the vibration process. The method currently used is the bolt fixing method, that is, pre-embedded nuts on the foundation pier, and bolts to secure the bottom surface of the accelerometer to the surface of the foundation pier.
The specific installation steps of the accelerometer are as follows:
- First, the surface of the foundation pier is treated, smoothed, and kept level.
- After leveling the surface of the foundation pier, use a precision compass for positioning, and engrave a cross line on the flat foundation pier surface to indicate the direction, usually indicating the south and north directions respectively. One point worth noting here is that since the north indicated by the compass is magnetic north, not true north, when using the compass to determine the direction of true north, the magnetic declination must be corrected.
- Determine the hole position for installing the expansion bolt on the surface of the foundation pier according to the cross azimuth line and the screw hole size of the accelerometer bottom plate.
- Use hand drills to make holes, and the hole diameter and hole depth are determined according to the size of the expansion bolt.
- After drilling the holes, install the expansion bolts.
- Install the accelerometer, and secure the base plate of the accelerometer to the surface of the foundation pier with bolts. Please note that the orientation of the accelerometer should be checked before it is secured. Take a closer look at the vial to determine whether the accelerometer is level. After the confirmation is correct, it can be fixed.
- Through the recorder or digital multimeter, adjust the zero position, the zero position is generally adjustable to within ±10mv.
Order Information
Production Name | Model | Notes |
Signal-axis servo accelerometer | SSM25385-05A | ±2g range, Z dimension, include 2m cable(extendable) |
Two-axis servo accelerometer | SSM25385-05B | ±2g range, X+Z dimension, include 2m cable(extendable) |
Three-axis servo accelerometer | SSM25385-05B | ±2g range, X+Y+Z dimension, include 2m cable(extendable) |



Applications
- Inclinometer Sensors for Dam Health Monitoring And Dam Deformation Monitoring
- TMS Intelligent Transmission Tower Safety Monitoring System Solution
- Applications of Vigor Sensors in Wind Turbine Installation and Health Monitoring
- Communication or Telecom Tower Safety Monitoring Solution with Inclinometers and Sensors
- Application of Inclination Sensor on Telescopic Handler for Tilt Monitoring
Contact Us
Contact: Vigor Technology
Phone: +86 18017387742
Tel: +86 021-58404921
E-mail: sales@vigordigital.com
Add: Block H1, No. 161, Lane 3188, Xiupu Road, Pudong New District, Shanghai